Um Robo Que Tem Um Ima Em Sua Base

O conceito de um robô que tem uma imagem em sua base desperta curiosidade em diversos cenários, desde aplicações industriais até interações lúdicas e educacionais. Trata-se de uma fusão interessante entre hardware especializado e representação visual, onde a imagem funciona como identidade, guia ou elemento comunicativo integrado à base estrutural do robô. Essa abordagem pode ser observada em protótipos de robôs guiados por visão, em sistemas de reconhecimento de padrões e até em designs que priorizam a interação humano-robô, tornando a relação visual um componente funcional, não apenas estético. Explorar esse tema envolve entender desde a captura e processamento de imagens até a integração com sensores e atuadores, formando um ecossistema no qual a imagem na base atua como ponto de referência, complementando a navegação, a localização e o reconhecimento de contexto.
Como surge a necessidade de um robô com imagem na base
A demanda por sistemas robóticos mais inteligentes e interativos fez com que engenheiros e pesquisadores explorassem formas de integrar informações visuais diretamente na plataforma física. Ter uma imagem na base do robô pode ser visto como uma estratégia para melhorar a comunicação, seja com outros robôs, com sistemas centralizados ou com humanos. Em ambientes de produção, por exemplo, essa integração permite que o robô reconheça rapidamente sua posição em relação a um marcador visual, facilitando a navegação autônoma. Do ponto de vista da interação, a imagem pode servir como um elemento de identidade ou como um indicador de estado, aumentando a transparência das ações robóticas. A sinergia entre base estrutural e elemento gráfico abre caminho para aplicações que vão desde a logística até o entretenimento, sempre com o foco em tornar o comportamento do robô mais previsível e compreensível.
Quais são os componentes técnicos por trás dessa configuração
A implementação prática de um robô que carrega uma imagem em sua base envolve a coordenação de sensores de visão, processamento de imagens e sistemas de posicionamento. Sensores como câmeras podem ser integrados à própria base ou posicionados estrategicamente para capturar a imagem de referência durante o movimento. Em seguida, algoritmos de processamento de imagens, como detecção de bordas, reconhecimento de formas ou deep learning, interpretam essa imagem em tempo real, extraindo informações que guiam a tomada de decisão. A base, por sua vez, atua como uma plataforma física estável, garantindo que a imagem fique em uma posição ideal para captura por outros sensores ou para ser reconhecida por sistemas externos. A sincronização entre câmera, algoritmo de interpretação e atuadores que movem o robô é crucial para manter a precisão e a robustez do sistema.

Quais são os principais desafios na integração
Embora a ideia seja atraente, há obstáculos técnicos que exigem atenção cuidadosa. Um deles é a iluminação inconsistente, que pode afetar a qualidade da imagem capturada pela base do robô, dificultando a detecção precisa de padrões. Outro desafio está na calibragem precisa entre a câmera, a base física e os algoritmos de reconhecimento, pois pequenos desalinhamentos podem gerar erros de interpretação. Além disso, o custo de sensores de alta qualidade e a demanda por processamento em tempo real podem limitar a adoção dessa configuração em projetos de menor escala. Superar esses obstáculos exige escolhas estratégicas em hardware e software, buscando equilíbrio entre desempenho, custo e confiabilidade, especialmente em aplicações que operam em ambientes dinâmicos e exigentes.
Quais as aplicações mais promissoras dessa abordagem
As possibilidades de uso são vastas e se estendem a setores como manufatura, saúde, logística e entretenimento. Na indústria, um robô com imagem na base pode atuar como guia visual em linhas de produção, reconhecendo marcadores ou etiquetas para otimizar fluxos de trabalho. Em ambientes hospitalares, pode auxiliar no transporte autônomo de insumos, usando a imagem como referência em trilhas predefinidas. No varejo, essa configuração pode ser aplicada em sistemas de apresentação interativa, onde o robô exibe informações ou recebe comandos por meio de padrões visuais. A cada dia, novas sinergias surgem, impulsionadas por avanços em visão computacional e robótica autônoma, tornando essa combinação uma aposta interessante para inovação.
Como projetar um robô com imagem na base de forma eficaz
Um projeto bem-sucedido parte de uma definição clara de objetivos, alinhando a escolha da imagem, a posição da câmera e a arquitetura de processamento. É essencial começar com um protótipo que valide a leitura da imagem em condições reais, ajustando ângulos, distâncias e fontes de iluminação. A seleção de sensores deve considerar resolução, ângulo de visão e taxa de captura, garantindo que a base do robô ofereça uma referência estável e mensurável. No desenvolvimento de software, é fundamental integrar pipelines de visão computacional com motores de decisão e sistemas de controle de movimento, garantindo que as informações extraídas gerem ações coerentes. Testes iterativos e simulações ajudam a refinar a sincronia entre elementos, resultando em um sistema robusto e com desempenho previsível.

Perguntas frequentes
Por que um robô precisa de uma imagem em sua base
A imagem na base atua como referência visual que auxilia na navegação, reconhecimento de ambiente e comunicação, permitindo que o robão identifique posições, evite obstáculos ou interaja de forma mais intuitiva com humanos e outros sistemas.
Quais tipos de câmeras podem ser usados nesses robôs
Camerações como câmeras estáticas, câmeras móveis ou sensores de visão estéreo podem ser empregados, dependendo da necessidade de captura de imagens estáticas, panorâmicas ou em profundidade para reconhecimento de padrões.
Quais são os principais erros de projeto a evitar
Erros comuns incluem má posicionamento da câmera em relação à base, iluminação inadequada e falta de calibragem precisa, o que pode levar a falhas na detecção visual e comportamentos imprevisíveis do robô.
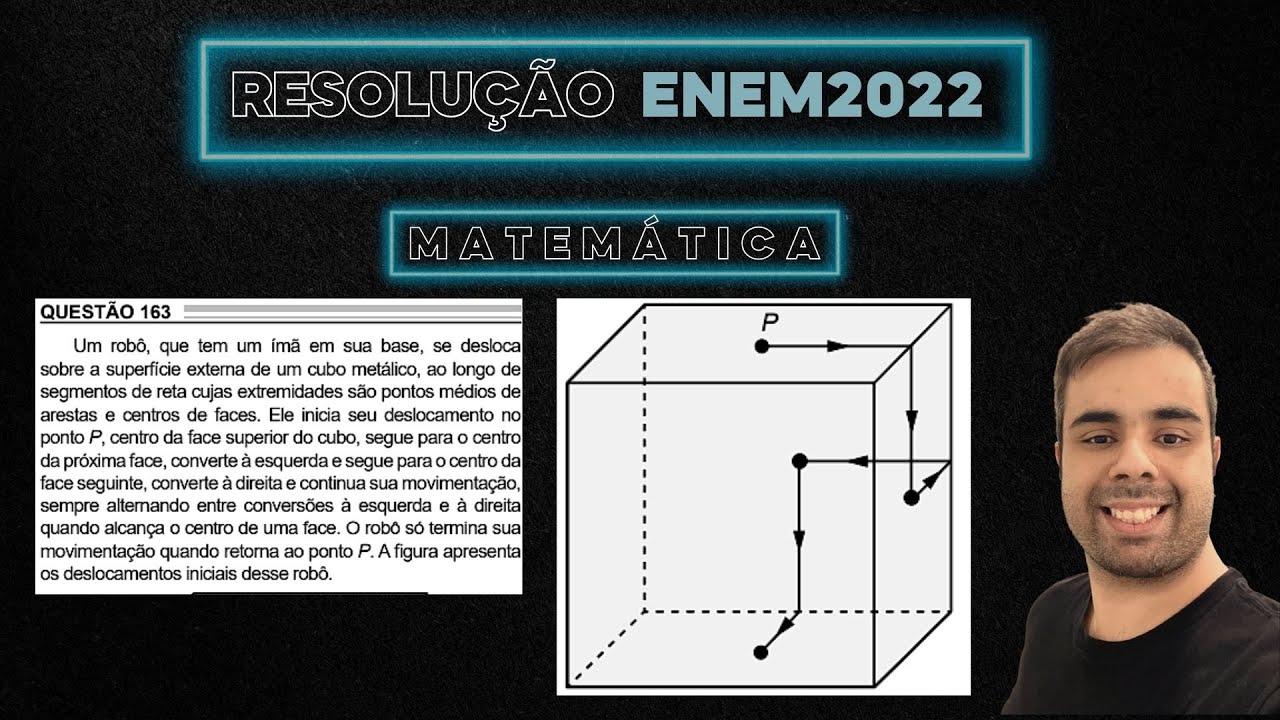
ENEM 2022 Um robô que tem um imã em sua base se desloca sobre a superficie externa,
Estude comigo para o ENEM 2023: Http://matematicamastigada.com.br Olá, meu nome é Marcos Rodrigues e sou o professor ...
