Esqueleto Apendicular
En este tutorial detallado, aprenderás a trabajar con el esqueleto apendicular de forma estructurada, desde su definición hasta su integración en proyectos prácticos, siguiendo un enfoque paso a paso claro y verificable.
¿Qué es exactamente el esqueleto apendicular y por qué importa?
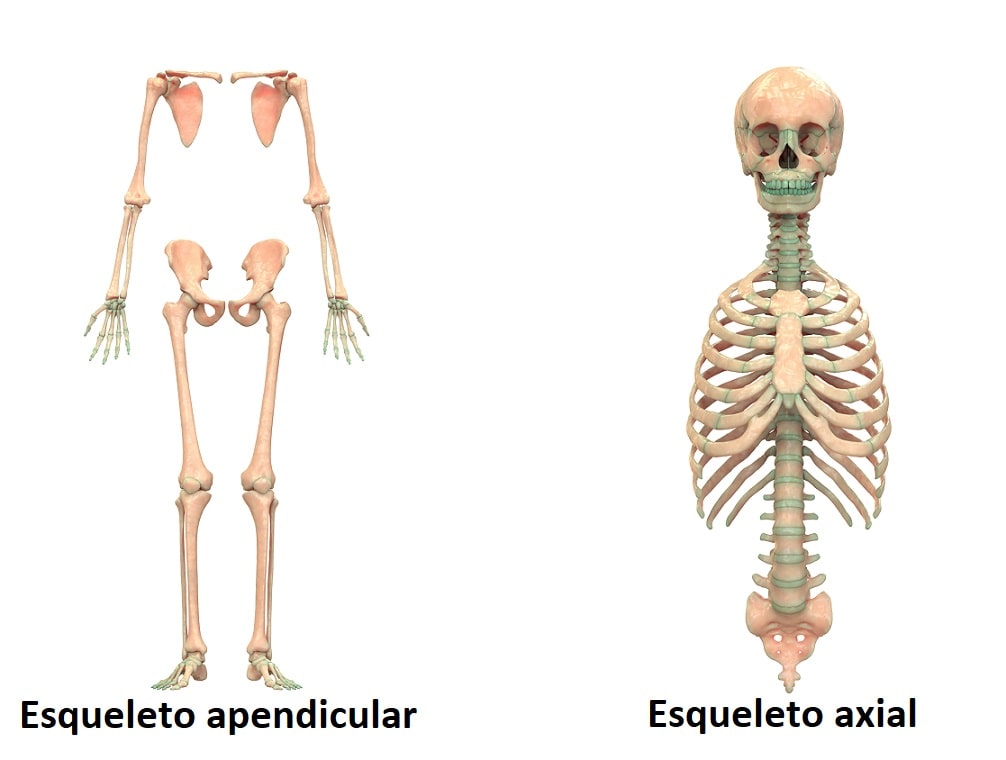
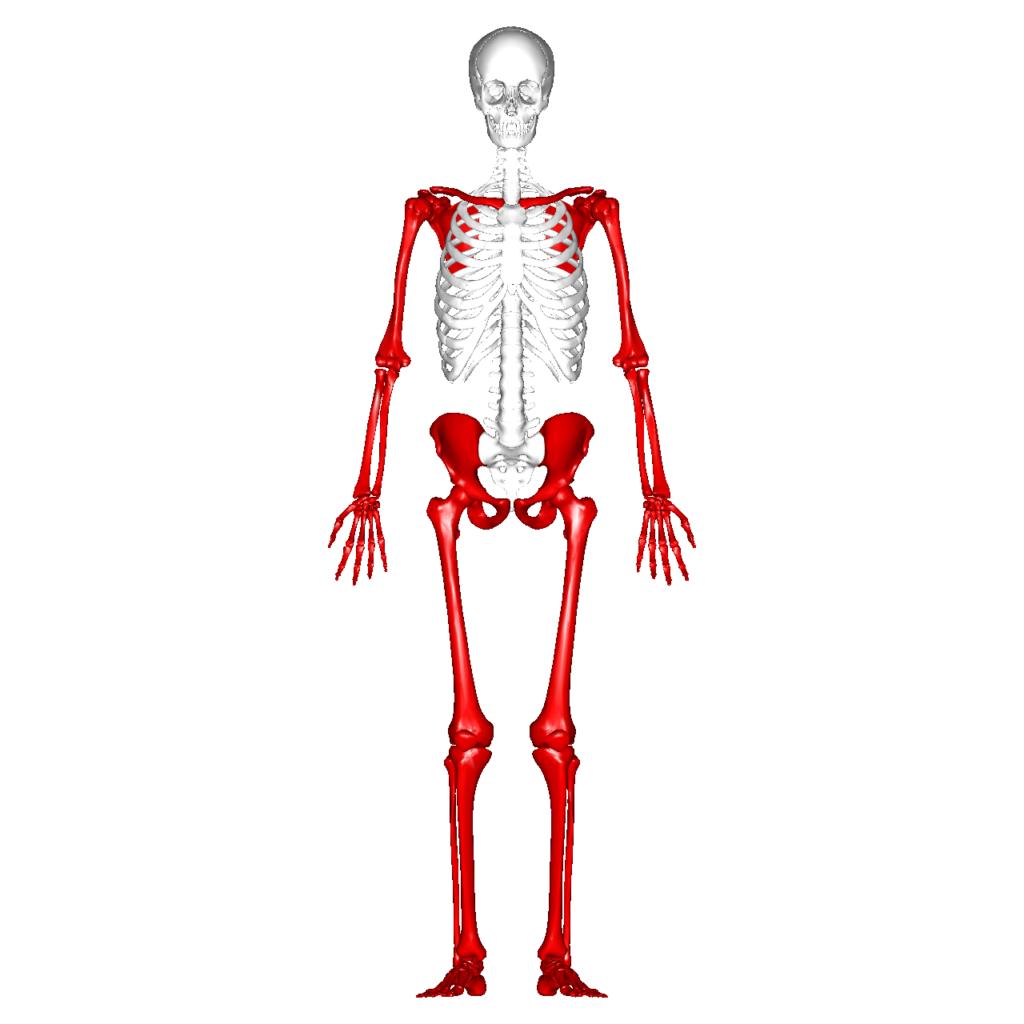
El esqueleto apendicular se refiere al conjunto de estructuras óseas y conectivas que conforman los apéndices de un organismo, como brazos, piernas, alas o extremidades móviles. En contextos biomecánicos, robóticos o de animación, este concepto permite modelar el soporte y la movilidad de forma modular. Su importancia radica en que facilita la replicación de movimientos naturales, la planificación de trayectorias y la integración con sensores o actuadores, lo que lo convierte en un componente clave en sistemas que requieren dinámica articular precisa.
¿Cómo identificar las partes del esqueleto apendicular en un modelo?
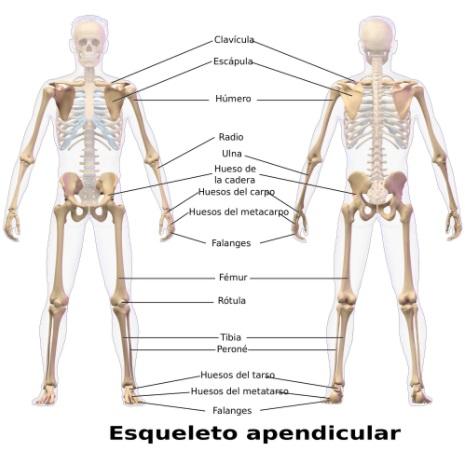
Antes de trabajar con este sistema, es esencial reconocer sus componentes básicos, que varían según el dominio, pero suelen incluir elementos centrales y periféricos.
Elementos centrales y periféricos
Los elementos centrales suelen ser los huesos o estructuras principales que unen el tronco con los apéndices, como el húmero en el brazo o el fémur en la pierna. Los elementos periféricos incluyen los segmentos distales, como antebrazo, mano, pierna y pies, así como las articulaciones intermedias que permiten la flexión y rotación.
¿Cuáles son los requisitos previos y herramientas necesarias?
Para implementar un esqueleto apendicular funcional, necesitas combinar conocimientos teóricos con recursos técnicos específicos, ya sea para simulación, robótica o animación.
- Herramientas de modelado: software como Blender, Maya, o aplicaciones CAD para esqueletos estáticos.
- Librerías y frameworks: en robótica, ROS con MoveIt; en animación, sistemas de rigging y motores como Unity o Unreal.
- Sensores y control: cámaras de seguimiento, IMUs, servomotores o actuadores para sistemas físicos.
- Referencias anatómicas: atlas óseos, diagramas de articulaciones y bases de datos de movimientos.
¿Cómo diseñar un esqueleto apendicular funcional y estable?
El diseño requiere equilibrar la estructura, la cinemática y los límites físicos para evitar inestabilidad o errores de movimiento.

- Define la finalidad: ¿servirá para caminar, agarrar objetos, nadar o realizar tareas específicas? Esto guía la distribución de longitudes y grados de libertad.
- Modela la estructura base: parte del hueso más cercano al tronco y define su longitud, diámetro y orientación inicial.
- Añade articulaciones estratégicas: ubica las juntas de forma que permitan un rango de movimiento realista sin conflictos mecánicos.
- Integra segmentos distales: completa con huesos o componentes secundarios, ajustando tamaños y pesos según el uso previsto.
- Prueba la cinemática: simula movimientos básicos para verificar que no haya colisiones ni posiciones inválidas.
¿Cómo integrar el esqueleto apendicular en un sistema robótico o de animación?
La integración implica vincular el modelo estático con controladores, algoritmos de movimiento y, en algunos casos, aprendizaje automático para optimizar trayectorias.
Pasos clave para la integración
- Exporta el esqueleto en un formato compatible con tu plataforma (por ejemplo, FBX para animación, URDF para ROS).
- Configura los parámetros físicos: masa, inercia, límites de rotación y fricción en las articulaciones.
- Implementa un controlador PID o un sistema de planificación de movimiento para regular las articulaciones.
- Si es necesario, agrega sensores de retroalimentación para ajustar posiciones en tiempo real.
- Realiza pruebas de carga y ciclo de vida para validar la estabilidad bajo diferentes condiciones.
¿Qué errores comertos al trabajar con esqueleto apendicular y cómo evitarlos?
- Errores en la jerarquía de nodos: asegúrate de que cada segmento herede correctamente la transformación del padre; de lo contrario, producirá deformaciones o rotaciones inesperadas.
- Límites de articulación inconsistentes: define claramente los rangos mínimo y máximo para evitar doblados imposibles o bloqueo mecánico.
- Desbalance de masas: calcula el centro de masa de cada segmento para mejorar la estabilidad durante el movimiento.
- Colisiones no detectadas: usa volúmenes de colisión simples y realiza pruebas de proximidad entre segmentos adyacentes.
- Submuestreo en animaciones: en rigging, emplea constraints y drivers para mantener la coherencia entre huesos y malla.
¿Cómo optimizar el rendimiento y la precisión del esqueleto apendicular?
La optimización se centra en reducir la complejidad innecesaria sin sacrificar funcionalidad, utilizando técnicas de simplificación y ajuste fino de parámetros.
Estrategias prácticas
- Usa versiones low-poly del esqueleto para fases tempranas de desarrollo y prueba de concepto.
- Implementa LOD (Level of Detail) para cambiar la resolución del esqueleto según la distancia o el tamaño en pantalla.
- Agrupa articulaciones similares para aplicar control en lotes y reducir sobrecarga computacional.
- Emplea interpolación de curvas suaves para movimientos más naturales y menos rígidos.
- Si es robótica, ajusta la ganancia de los controladores para minimizar oscilaciones y error de posición.
¿En qué proyectos puedes aplicar el esqueleto aprendido y cómo medir su éxito?
Los casos de uso incluyen desde videojuegos y simulaciones hasta prototipos de robots de asistencia, donde la medición se basa en métricas de precisión, fluidez y eficiencia energética.
- Videojuegos y animación: éxito medido por naturalidad del movimiento, respuesta en tiempo real y compatibilidad con locomociones existentes.
- Robótica móvil y de servicio: éxito evaluado en capacidad de navegación, estabilidad durante transiciones y consumo de energía.
- Simulación médica o biomecánica: éxito basado en la correlación con datos experimentales y reproducción de patrones biomecánicos observados.
Mediante el uso de indicadores como error de posición关节误差, frames por segundo, y margen de seguridad ante obstáculos, puedes cuantificar el rendimiento y guiar mejoras iterativas.
Conclusión y próximos pasos para dominar el esqueleto apendicular
Trabajar con un esqueleto apendicular requiere combinar teoría estructural, práctica en herramientas de modelado y enfoques iterativos de prueba y ajuste. Comienza con un diseño simplificado, valida la cinemática en entorno controlado y escala progresivamente la complejidad según los requisitos del proyecto.
FAQ: preguntas frecuentes sobre el esqueleto apendicular
- ¿Diferencia entre esqueleto axial y apendicular? El esqueleto axial incluelve el cráneo, columna y torso, mientras que el apendicular se enfoca en extremidades y estructuras anexas.
- ¿Se puede usar en animación 2D? Sí, aplica rigging con huesos y constraints, aunque suele ser más común en 3D por la complejidad de las articulaciones.
- ¿Qué tan importante es la física en el esqueleto apendicular? Es crucial para simular interacciones realistas, colisiones y respuesta a fuerzas externas, especialmente en robótica y biomecánica.
- ¿Cómo medir la naturalidad de un movimiento basado en esqueleto? Compara con grabaciones de referencia, usa análisis de movimiento y evalúa percepción humana en pruebas cualitativas o cuantitativas.
